



像卫星探索宇宙空间一样,水下机器人是人类的眼睛和手臂在海底的延伸。下面小编将带您认识深水油气开发的利器——水下机器人。
中国在水下机器人研究方面起步虽晚,但通过不懈努力取得了巨大技术成果。2014 年我国自主研制的 6000 米 AUV( 无缆水下机器人 )“潜龙一号”在东北太平洋多金属结核合同区成功下潜作业、“蛟龙号”下水、“北极 ARV”助力科考,都彰显了我国在水下机器人领域的研发决心和科研技术成果。
未来 10 年将是中国水下机器人发展的关键期。与水下机器人最相关的三个行业是海洋油气业、海洋渔业以及海洋矿业。
一、水下机器人向深海进发
水下机器人是工作于水下的极限作业机器人,能潜入水中代替人完成某些操作,又称无人遥控潜水器。由于水下环境恶劣危险,人的潜水深度有限,所以水下机器人日益成为开发海洋的重要工具。
水下机器人分类
广义上的水下机器人,也可称作潜水器 (UnderwaterVehicles),是一种可在水下代替人,在充满未知的海洋环境中完成某种任务的装置。
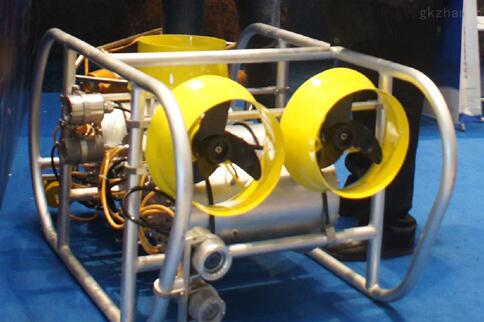
就外形看,目前大部分水下机器人是框架式或类似于潜艇的回转细长体。随着仿生技术的不断发展,仿鱼类形态和运动方式的水下机器人,将会不断发展。
根据是否载人,可将潜水器分为载人潜水器和无人潜水器。无人潜水器按照与水面支持系统间联系方式的不同,可以分为有缆遥控水下机器人 (Remotely Operated Vehicle,简称ROV)、无缆水下机器人(Autonomous Underwater Vehicle,简称 AUV))两种。有缆水下机器人都是遥控式的,根据运动方式不同可分为拖曳式、( 海底 ) 移动式和浮游 ( 自航 ) 式三种。
无缆水下机器人一般是自治式机器人(又称智能机器人),它能够依靠本身的自主决策和控制能力,高效率地完成预定任务,在一定程度上代表了目前水下机器人的发展趋势。
载人潜水器是由人工输入信号操控各种动作,由潜水员和科学家通过观察窗直接观察外部环境。其优点是由人工亲自做出各种核心决策,便于处理各种复杂问题,但是人员面临的危险性大。由于载人潜水器需要足够的耐压空间、可靠的生命安全保障和生命维持系统,使得潜水器体积庞大、系统复杂、造价高昂、工作环境受限。
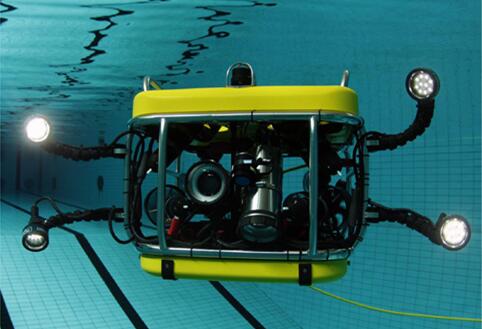
有缆水下机器人(ROV)需要由电缆从母船接受动力,且不需要人为干预。其主要由水面设备(包括操纵控制台、电缆绞车、吊放设备、供电系统等)和水下设备(包括中继器和潜水器本体)组成。潜水器本体在水下靠推进器运动,本体上装有观测设备(摄像机、照相机、照明灯等)和作业设备(机械手、切割器、清洗器等)。潜水器的水下运动和作业,是由操作员在水面母舰上控制和监视,电缆向本体提供动力和交换信息,中继器可减少电缆对本体运动的干扰。人们通过电缆对 ROV 进行遥控操作,电缆如同“脐带”一样,对 ROV 至关重要。但细长的电缆悬在海中,也成为 ROV 最脆弱部分,大大地限制了机器人的活动范围和工作效率。
无缆水下机器人(AUV)又称自治水下机器人、智能水下机器人,是将人工智能、探测识别、信息融合、智能控制、系统集成等多方面技术,集中应用于同一水下载体上,在没有人工实时控制的情况下,自主决策、控制完成在复杂的海洋环境中的预定任务的机器人。是从简单的遥控式向监控式发展,即由母舰计算机和潜水器本体计算机实行递阶控制,它能对观测信息进行加工,建立环境和内部状态模型。操作人员通过人机交互系统,以面向过程的抽象符号或语言下达命令,并接受经计算机加工处理的信息,对潜水器的运行和动作过程进行监视并排除故障。操作人员仅下达总任务,机器人就能根据识别和分析环境,自动规划行动、回避障碍、自主地完成指定任务。受益于近海油气开发,我国无人有缆遥控潜水器急速放量。

二、 我国水下机器人不懈努力跨越鸿沟
我国对水下机器人的研究与开发起步较晚,从七十年代末才开始研究,相比欧美和日本,我国一直处于落后水平。
我国的水下机器人研究,是从立足军事需求起步的。七十年代末期,中国科学院沈阳自动化研究所和上海交通大学开始从事ROV的研究与开发, 合作研制了我国第一个 “海人一号” ROV,“海人一号”是我国独立自主研发的第一台大型水下机器人。
目前 , 我国军用水下机器人已经形成系列,特别是 6000m 深水机器人的问世,表明我国在此领域已经取得了一定成绩。
CR-01型无缆自治水下机器人
CR-01 型无缆自治水下机器人是我国于 1992 年 6 月与俄罗斯科学院海洋技术研究所合作,于 1995 年 8 月研制成功的。其体长 4.37m,宽 0.8m,它在空气中的重量为 1305.15kg,它的最大潜深 6000m,最大水下航速 2 节,续航能力 10h,定位精度为10m ~ 15m,它可在 6000m 水下进行摄像、拍照、测量海底地势与剖面、海底沉物目标搜索和观察、水文物理测量和海底多金属结核丰度测量,并能自动记录各种数据及其相应的坐标位置。
“潜龙一号”AUV
2014 年 8 月 31 日,我国自主研制的 6000mAUV“潜龙一号”
在东北太平洋多金属结核合同区成功下潜作业,顺利完成了综合性能测试。“潜龙一号”长 4.6m、直径 0.8m、重量为1500kg,最大工作水深 6000m,巡航速度 2 节,最大续航能力24h,配有浅地层剖面仪等探测设备,可完成海底微地形地貌精细探测、地质判断、海底水文参数测量和海底多金属结核丰度测定等任务。
“蛟龙”号载人潜水器
2014 年 7 月,我国“蛟龙”号载人潜水器下潜作业,并对搭载的微型无人潜水器“龙珠”号进行试验。“龙珠”号重量仅有 40kg,配有 3 部电动推进器,通过一根光纤与“蛟龙”号相连,由“蛟龙”号球舱内的潜航员遥控控制,且自带摄像机,可进行水下观察和录像,与“蛟龙”号互补形成更全面的观测能力。在水下工作期间,“龙珠”号与“蛟龙”号按照预先规划的协同作业流程“分工协作”、“默契配合”,完成了相互之间互动拍摄和“龙珠”号的释放与回收等预定的工作任务,形成了两种不同类型的潜水器在水下协同作业的新模式。
“北极ARV”水下机器人
“北极 ARV”水下机器人能够在高纬度下实现对冰下海冰物理特征、水文和光学特性等的自主精确同步观测,为我国北极科考提供了一种大范围的先进、连续、实时的冰下观测技术手段。新一代北极 ARV 通过水下机器人携带光通量测量仪,可连续测量出海冰吸收的太阳辐射能的空间变化,估算出同纬度更大范围海冰对太阳辐射能的吸收,以此计算出太阳辐射对该纬度北极海冰融化的贡献。

三、水下机器人将何去何从
向远程发展
太阳能自主水下机器人能解决远程续航问题。智能水下机器人向远程发展的技术障碍有三个:能源、远程导航和实时通信。目前正在研究的各种可利用的能源系统,包括一次电池、二次电池、燃料电池、热机及核能源。太阳能自主水下机器人需要浮到水面给机载能源系统充电,而这种可利用的能源又是无限的。
向深海发展
发展优化 6000m 水深技术,成为许多国家的目标。海洋资源大多存储于深海,6000m 以上水深的海洋面积,占海洋总面积的97%。 因此, 许多国家把发展6000m水深技术作为目标,美国、日本、俄罗斯等国,都先后研制了 6000m 级的无人潜航器。美国伍兹霍尔海洋研究所研制的深海探测器“ABE”,可在水深 6000m 的海底停留一年;日本 1993 年研制了工作水深为 11000m 的深海无人潜水器“海沟号”;中国的“潜龙一号”也具备了 6000m 深度的作业能力。

向智能型发展
增加水下机器人行为的智能水平,一直是各国科学家的努力目标。但由于目前的人工智能技术还不能满足水下机器人智能水平增长的需要。因此,一方面,不能完全依赖于机器的智能,还需更多依赖传感器和人的智能,打造监控型水下机器人。另一方面,发展多机器人协同控制技术,也是未来自主水下机器人的重要发展方向。
免责声明:本网站所转载的文字、图片与视频资料版权归原创作者所有,如果涉及侵权,请第一时间联系本网删除。

官方微信
《中国腐蚀与防护网电子期刊》征订启事
- 投稿联系:编辑部
- 电话:010-62316606-806
- 邮箱:fsfhzy666@163.com
- 中国腐蚀与防护网官方QQ群:140808414

“海洋金属”——钛合金在舰船的

腐蚀与“海上丝绸之路”