港中大&马普所《Science》子刊: 双模态驱动策略实现液滴的三维操纵
2024-08-12 16:07:43
作者:材料科学与工程 来源:材料科学与工程
分享至:
液滴操纵在各种实际应用中都至关重要,特别是在生物医学、化学反应、热调节、水收集和微电子等领域。磁、电、光和超声波等各种外加物理场都可用于提高液滴操控的灵活性和精确度。在已有的研究中,液滴机器人在运输、合并、分散、捕获和分类等任务中的能力得到了验证。液滴机器人的流动性和极端变形能力也为微型软体机器人的生物医学应用提供了巨大的可能性,例如进入人体中难以到达的狭窄腔道。
为了解决传统软体机器人(尤其是基于磁性弹性体的软机器人)的变形局限性,最近的研究集中于具有极端变形能力的液滴机器人,例如液态金属机器人和磁流体机器人。基于磁流体的液滴机器人具有出色的变形能力,并且可以在磁场控制下分裂和融合,从而提高灵活性和可扩展性。然而,当前的研究主要集中在二维平面内单个液滴的变形和操控。这种二维平面内的操纵方式不仅限制了液滴的潜在应用场景,也限制了基于液滴的微型软机器人的功能和操作能力。实现液滴的三维操控和主动变形是该领域的一项关键挑战。此外,对多个液滴之间的相互作用及其自组织行为的研究有限,特别是关于多个液滴集合的原位操纵和重构。近期,德国马克斯普朗克智能系统研究所Metin Sitti教授和香港中文大学张立教授团队提出了一种双模态驱动策略,用于远程和可编程地三维引导单个和集群铁磁流体液滴。通过结合磁场和光场,这种方法可以控制液滴的三维运动和形变。磁场产生的磁偶极力促使液滴形成集体,而光场对磁流体液滴产生加热作用从而增强浮力,同时通过Marangoni流动触发界面张力的等温变化,促进液滴在三维空间中的运动。此外,这些液滴可以作为软机器人自主运行,能够运输物体。或者,当与水凝胶外壳结合时,它们会组装成由阳光驱动的水母状机器人。本研究突破了现有液滴控制方法主要局限于二维变形和运动的瓶颈,实现了液滴机器人在三维空间中的操控。这种双模态驱动策略不仅可以单独控制液滴,还可以操控多个液滴的集群行为,扩展了液滴在微型机器人领域的应用范围。特别是,通过结合磁场和光场,实现了液滴更加复杂的运动模式和集群行为,为微型软机器人在复杂环境中的应用提供了新的可能性。
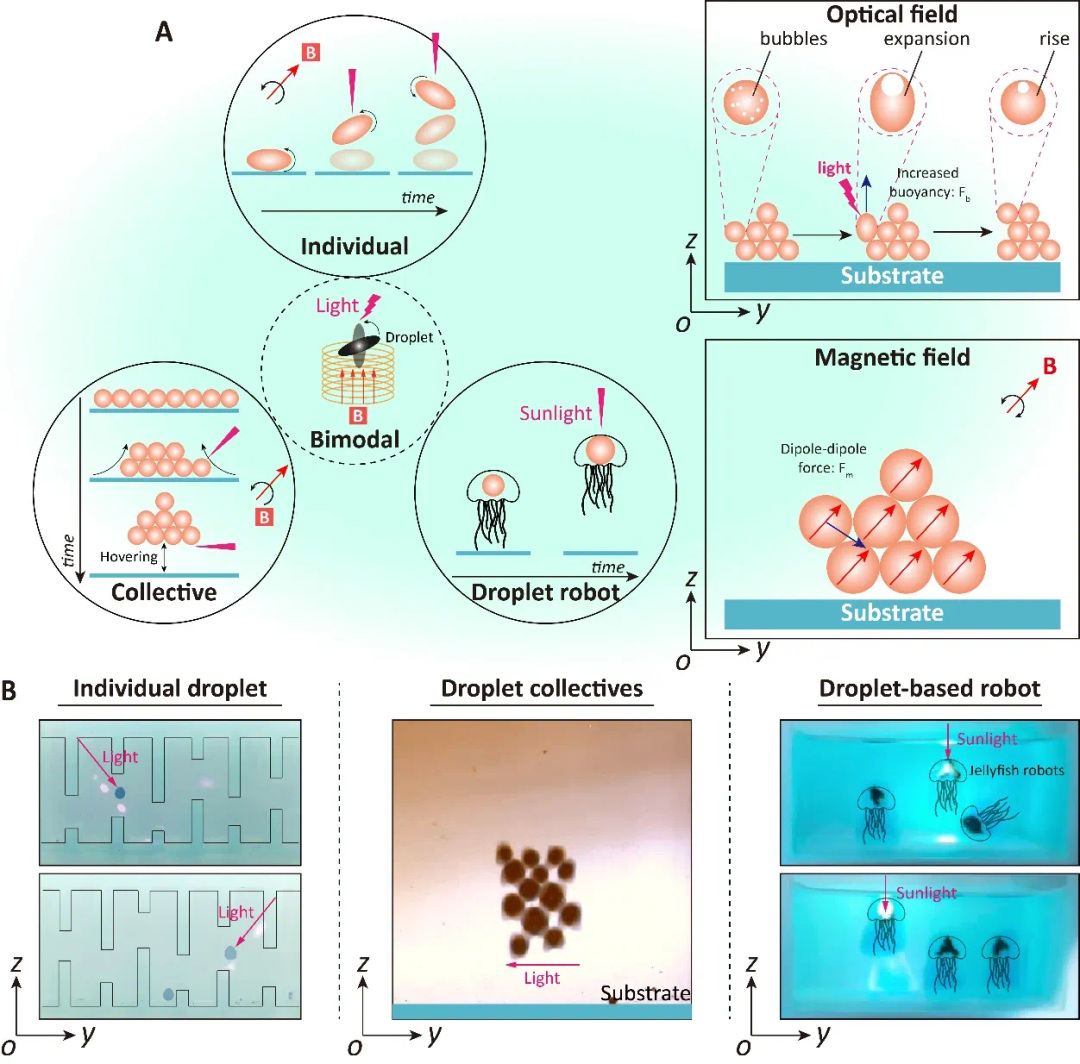
示意图和实验结果显示了双模态驱动液滴的单体运动和群体组装行为。A. 双模态驱动液滴通过耦合磁场和光场进行三维运动和选择性控制。光场为液滴提供向上的浮力,磁场提供磁偶极力。因此,单个液滴可以像“Flappy Bird”一样穿越复杂的三维地形,多个液滴可以组装成金字塔结构并保持悬停或与水凝胶模块一起作为水母机器人。B. 实验结构显示液滴可以穿越复杂的地形,或自组装成液滴聚集体然后保持悬浮状态,或与水凝胶壳组装成在阳光下自由移动的水母状机器人。该工作近期以“Individual and collective manipulation of multifunctional bimodal droplets in three dimensions”为题发表在Science Advances上。马克斯普朗克智能系统研究所博士后孙猛猛, 香港中文大学博士生孙伯男, 马克斯普朗克智能系统研究所MYUNGJIN PARK为共同第一作者,马克斯普朗克智能系统研究所Metin Sitti教授和香港中文大学张立教授为共同通讯作者。https://www.science.org/doi/10.1126/sciadv.adp1439后记:该工作是孙猛猛博士近期关于磁驱动微型机器人相关研究的最新进展之一。近年来,孙猛猛博士利用铁磁流体创建了一系列磁驱动微型机器人,实现了毫米尺度软体机器人磁编程控制和微米尺度机器人群体调控。(Nat. Commun., 2022, 13(1); Adv. Mater., 2023, 2300521; Sci. Adv., 2023, 9(45): eadj4201)。
免责声明:本网站所转载的文字、图片与视频资料版权归原创作者所有,如果涉及侵权,请第一时间联系本网删除。





